
#5. Проверь состояние винтов и закрепи их покрепче
![]()
Заведи двигатели и проверь состояние винтов. Звук должен быть ровный, без посторонних шумов. Перед каждым взлетом проверяй, правильно ли закрепил их. Это поможет избежать несчастных случаев.
На всех пропеллерах DJI есть пиктограмма, показывающая, в какую сторону его нужно повернуть до щелчка, чтобы закрепить. Пропеллеры нельзя перепутать местами — они просто не защелкнутся, если пытаешься установить не на свое место.
Также помни, что винты не одинаковые, а парные. Первый и четвертый, как второй и третий — между собой одинаковы.
Нижняя часть всех винтов смотрит в сторону батареи.
Управление с пульта
Передача команд с помощью пульта управления — наиболее распространенная опция, применяемая как в бюджетных, так и дорогих коптерах. Оператору предлагается ряд стандартных режимов:
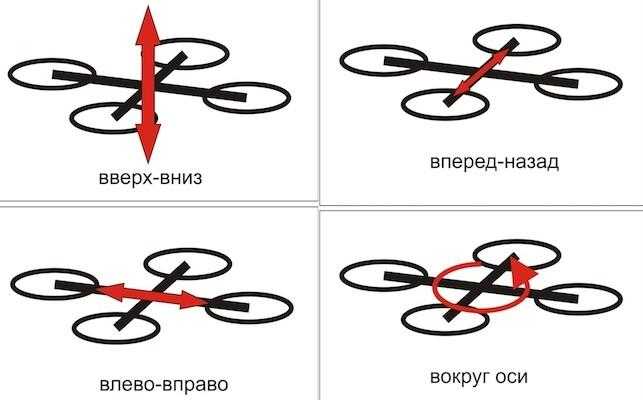
- подъем вверх;
- опускание со снижением оборотов двигателя;
- вращение в горизонтальной плоскости;
- наклоны в двух плоскостях.
![]()
Все операции производятся с помощью двух джойстиков. Левый отвечает за обороты двигателей и вращение. Перемещая джойстик вперед-назад, регулируют тягу: взлет и посадка. Боковое изменение положения дает команду на вращение летающей машины в горизонтальной плоскости. Перемещение джойстика влево — против часовой стрелки, вправо — в ее направлении.
Второй манипулятор отвечает за наклоны машины. Управление дроном предусматривает:
- наклон вперед для движения в данном направлении;
- наклон назад для торможения тягой или движения;
- наклоны вбок для управления траекторией или перемещения;
Манипулируя правым джойстиком пульта, можно правильно управлять квадрокоптером при его следовании по сложной траектории. Это можно считать основным функциональным каналом.
Кроме двух джойстиков, на пульте может находиться несколько функциональных кнопок. Они активируют те или иные режимы работы коптера. Например:
- разблокировка двигателей, чтобы начать взлетать и пользоваться квадрокоптером;
- зависание в стационарной позиции, для моделей с таким функционалом;
- автоматическая плавная посадка;
- выполнение заданного маршрута следования.
Сложные и дорогие квадрокоптеры могут иметь набор функций, для которого не хватит нескольких кнопок на пульте. Оператору предлагается выбрать режимы, которые активируются при нажатиях. Начальная настройка пульта не отличается сложностью, производитель предоставляет самые подробные инструкции.
![]()
Программирование автономного полёта с помощью mavros
Управление виртуальным дроном jMAVSim возможно по протоколу mavlink, который описан в нескольких статьях (например , ). Для осуществления mavlink-коммуникации мы будем использовать пакет mavros системы ROS (robot operating system).
Разработчики PX4 рекомендуют использовать ROS Kinetic.
Пакет mavros обеспечивает связь по протоколу MAVLink между компьютером, на котором работает ROS (например, виртуалка с Linux, или Raspberry PI) и полётным контроллером (реальным или в среде симулятора).
Пакет mavros устанавливается вместе с другими пакетами в ходе полной установки ROS Kinetic.
Запуск пакета mavros с подключением к симулятору осуществляется командой roslaunch, с указанием ip адреса и порта компьютера, на котором запущен симулятор:
Если симулятор запущен не на том хосте, на котором работает jMAVSim – перед подключением mavros нужно разрешить рассылку mavlink сообщений по сети с помощью команды в консоли jMAVSim. При выполнении команды выводится ip-адрес хоста, используемый для протокола mavlink. Порт можно узнать с помощью команды в консоли симулятора:
Успешность подключения к полётному контроллеру следует проверить с помощью команды:
Если подключение успешно – в консоли начнут появляться сообщения т.н. mavlink heartbeat, примерно раз в секунду:
Если сообщения не появляются/не обновляются/поле Connected = False – связь с полётным контроллером не установлена, и следует разобраться, почему.
На момент написания статьи, под Windows после команды param set MAV_BROADCAST 1 в консоли jMAVSim начинали в цикле выводиться сообщения:
Чтобы симулятор заработал корректно под Windows, следует дополнить строку 1029 файла src/modules/mavlink/mavlink_main.cpp:
И перекомпилировать/перезапустить симулятор командой .
О данной проблеме сообщено разработчикам, возможно, её исправят в последующих релизах.
- Переводим дрон в режим OFFBOARD (в новой отдельной сессии терминала):
- Отправляем команду перевести дрон в режим полёта (т.е. «заармить»):
После выполнения последней команды виртуальный дрон должен взлететь и зависнуть на высоте 5 метров:
Также запуск дрона можно осуществить с помощью несложного кода на Питоне:
Приведённый код использует вызов тех же сервисов ROS, что и пример вызова из командной строки.
Код нужно скопировать в текстовый файл, например, fly_jmavsim.py, и запустить его на выполнение из командной строки командой .









В процессе отладки данного примера столкнулся с особенностью симулятора jMAVSim – для нормальной работы ему требуется производительный процессор. На виртуалке Linux он успевал просчитывать только 10 FPS, и падал сразу после взлёта. На ноутбуке, пока я писал статью – он также периодически терял управление/падал. Помогло питание ноутбука от сети – т.к. при питании от батарейки включается режим энергосбережения, что занижает производительность процессора, которая сказывается непосредственно на работе симулятора.
На основании приведённых примеров желающие могут сами разработать программы автономных полётов (по квадрату, по кругу, по произвольной траектории, и т.д.). Выполнение таких упражнений может быть полезным для подготовки к программированию автономных миссий на реальном квадрокоптере.
Желаем всем успешных полётов!
Триммирование квадрокоптера
Достаточно простой процесс, позволяющий точно откалибровать движения дрона и обеспечить хорошую управляемость в полете
При выполнении процесса обращайте внимание на следующие правила:
- если квадрокоптер клонит влево, то триммировать по рудеру его нужно в правую сторону и наоборот;
- если при полете дрон кивает носом вперед, то триммируем назад и обратно.
Для оценки направления, требующего настройки, достаточно сделать разворот квадрокоптера на 360 градусов по любому из основных направлений. Для этого достаточно потянут правый стик в одну из сторон и нажать верхнюю кнопку.
Перед тем как начать триммирование квадрокоптера нужно помнить, что у современных дронов имеется два режима работы (высокий и низкий расходы энергии), поэтому важно оценить качество его работы в каждом из них по отдельности
Также обратите внимание на правильность сборки самого коптера, так как иногда пропеллеры не крутятся даже при полностью исправных моторах
Ответственность за использование беспилотников
![]()
Постановление Правительства так же регулирует правила эксплуатации БПЛА.
Владелец несет ответственность «за предотвращение столкновений беспилотного воздушного судна с пилотируемыми воздушными судами и другими материальными объектами в воздухе, а также столкновений с препятствиями на земле».
В соответствии с этим требованием сотрудникам МВД, ФСО, ФСБ и Росгвардии дано право пресекать несанкционированное использование беспилотных воздушных судов (БВС), в том числе уничтожая их.
При любых обстоятельствах силовики имеют право с помощью идентификации личности по регистрационным номерам связаться с пилотом для изменения траектории или посадки беспилотника.
При невозможности связаться с владельцем силовики могут имеющимися средствами менять траекторию полета беспилотника без его повреждения.
Если беспилотник создает угрозу для жизни и здоровья граждан или безопасности стратегических или важных объектов инфраструктуры, его полет может быть сотрудниками правоохранительных органов принудительно пресечен.
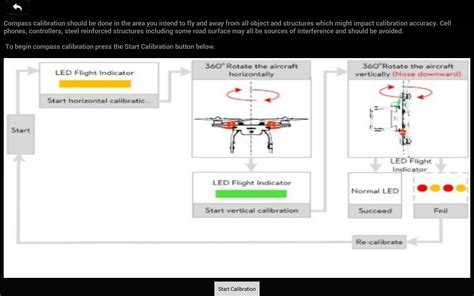
Для чего нужна калибровка квадрокоптера
![]()
Дрон в полёте может клониться в стороны и крутиться по кругу. Неправильная настройка квадракоптера может привести к несчастному случаю, Вы можете нанести телесные травмы себе и окружающим или испортить чьё нибудь имущество и вся ответственность ляжет на оператора который управлял данным аппаратом. Так что с помощью триммирование квадрокоптера Вы сможете его настроить и избежать непредвиденных ситуаций.
Следует ли калибровать квадрокоптер?
Чтобы это понять, поднимите его на высоту и попробуйте полетать. Команда «вперёд» даёт на дрон сигнал лететь строго вперёд, без наклонов в какие-либо стороны. Точно так же проверить и другие направления. Если нарушения при полёте были выявлены – не стоит откладывать дело в долгий ящик, надо действовать.
Где должна происходить калибровка?
Калибровка квадрокоптера осуществляется на высоте более полуметра. Так и безопаснее, и ничего не мешает. Калибровать удобней всего при безветрии.
Типы калибровки
Существует 3 типа калибровки:
- Механическая – её используют в случае, если отклонение от необходимой оси не слишком большое. Осуществляется путём подкручивания регулятора тяги коптера.
- Автоматическая – осуществляется настройкой аппарата с пульта управления. Нужна, если требуется сместить триммер на 5 позиций или больше. Калибровка зависит от пульта и контроллера, так что без мануала тут не обойтись.
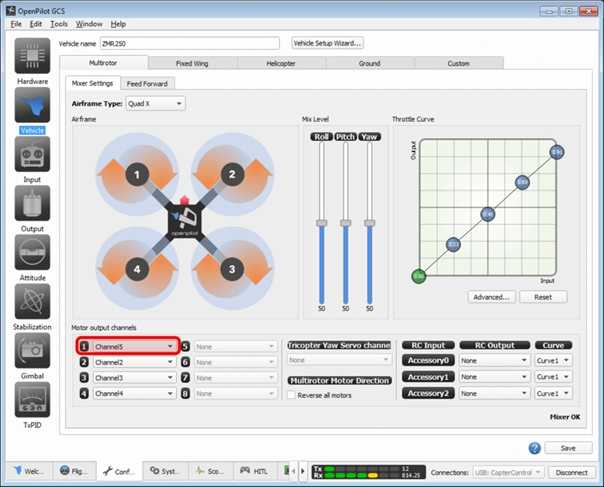
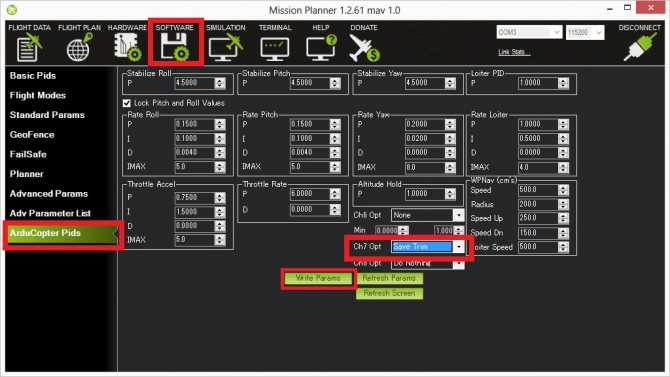
- При помощи программного обеспечения mission planer. Программа заточена для работы с платами Ardupilot. Все необходимые настройки задаются программно. Обычно производится перед первым полётом собранного дрона.
![]()
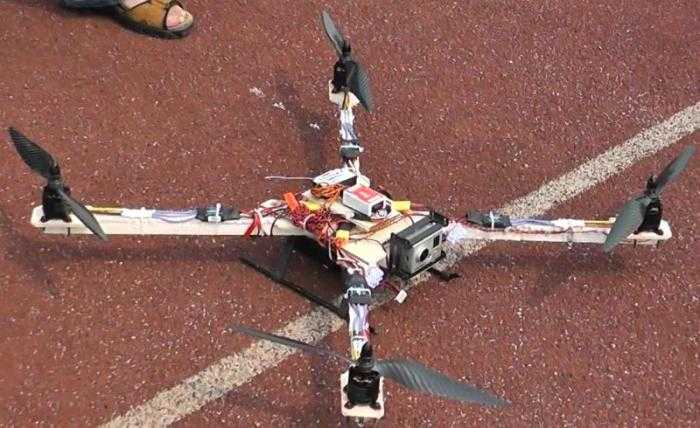
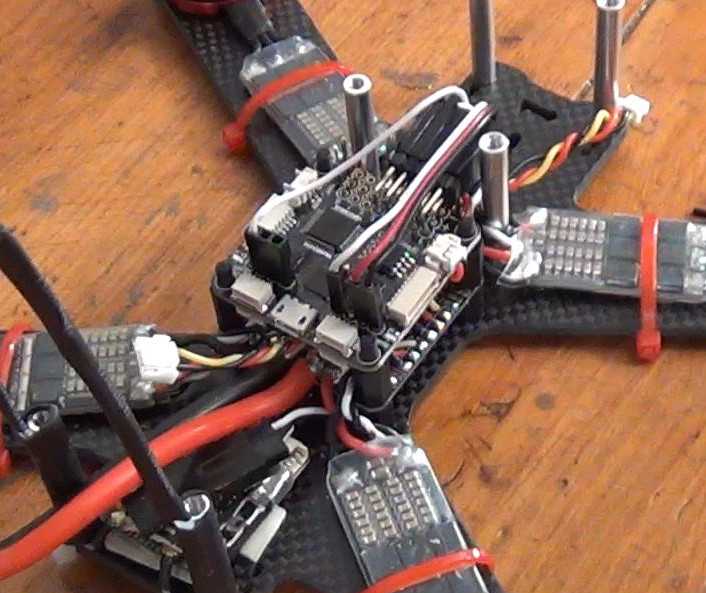
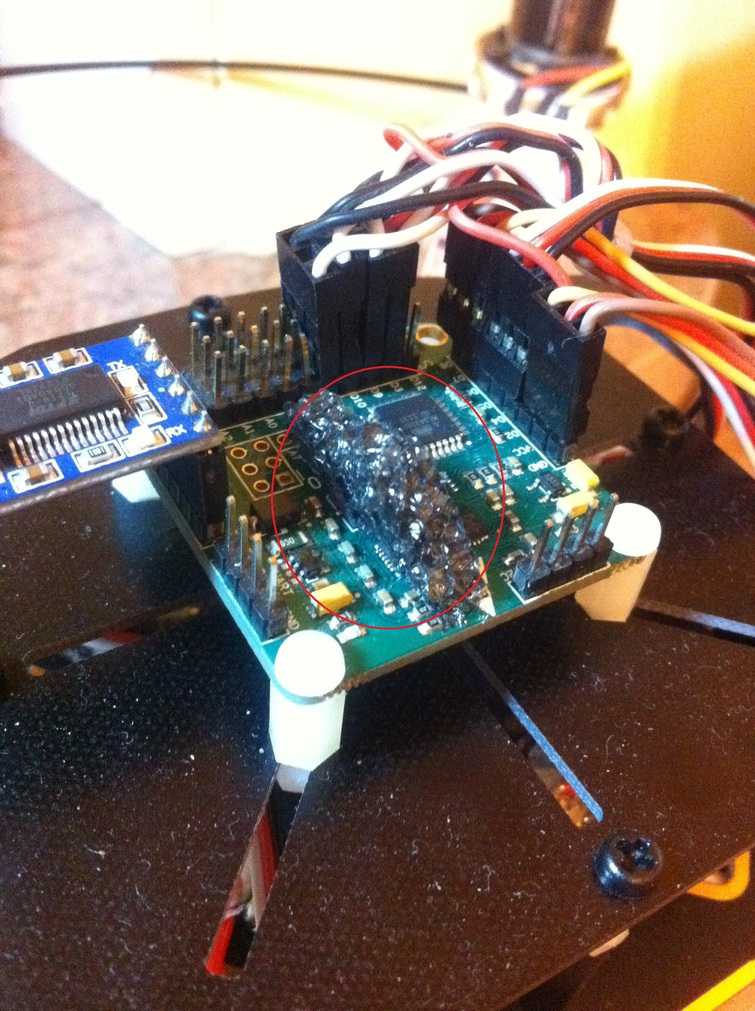
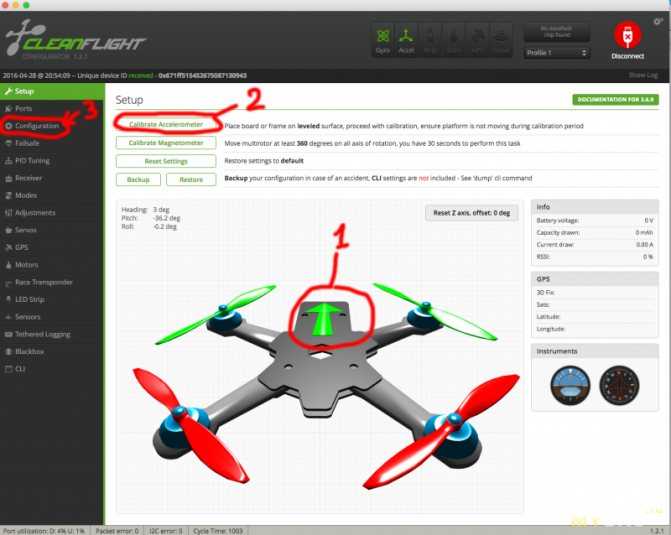
Для калибровки выполните следующие действия
![]()
- Включите передатчик радиоуправления (само радиоуправление должно быть отлажено). Выставьте ручку газа на всю.
- Возьмите Li-Po аккумулятор и подключите к разъёму Power-модуля, чтобы включить автопилот.
- Далее APM начнёт моргать красными и синими светодиодами. Это значит, что он готов для калибровки после следующего включения. Отключите аккумулятор от APM.
- Опять включите питание. Регуляторы издадут стандартный сигнал (число сигналов равно числу банок в батарее), а после издадут двойной короткий сигнал, подтверждающий калибровку по максимальной скорости.
- Опустите ручку газа до минимального положения. Один длинный сигнал – откалибровано по минимальной скорости.
- Теперь регуляторы для APM8 успешно откалиброваны. Можете проверить работу моторов.
- Уберите газ на минимальное состояние и выключите питание Ardupilot.
Ручной режим полета
(Manual Mode)
При положении Manual Mode вы не можете убирать пальцы от джойстиков, потому что требуется много поправок во время полета. Здесь нет никакой помощи от системы стабилизации. Опять же, это идеальный режим для фигур высшего пилотажа, и для таких полетов, которые требуют точного контроля и управления от пилота, например, полет с препятствием или при выполнении петли.
(Рис.1)
(Рис.2)
При полете с выключенной функцией интеллектуального управления ориентацией (переключатель находится в положении OFF), пилот управляет дроном, ориентируясь на то, куда обращен нос коптера. (Рис.7) При нажатии на джойстик вперед, нос уходит от пилота (при условии, что вы стоите за квадрокоптером и нос направлен в сторону от вас).










Нажатием стика вправо, бемпилотник движется вправо, и, соответственно, нажав стика влево, мультикоптер станет двигаться влево. Это все понятно, до тех пор, пока нос мультиротора не будет смотреть на пилота. Тогда все движения квадрокоптер начнет делать в «зеркальном» виде, и это может дезориентировать пилота. (Рис.8) Т.
Если квадрокоптер находится на некотором расстоянии, то достаточно трудно, даже для опытного владельца, увидеть, куда обращен нос. Лучше всего воспользоваться двумя другими режимами интеллектуального управления ориентации. Кстати говоря, наличием этих двух нижеописанных функций могут похвастаться только мультироторные системы. Для самолетов они не доступны, а у вертолетов встречаются крайне редко и очень дорогостоящие.
Смотрите про коптеры: Что такое квадрокоптер, как он работает
![]()
(Рис.7)
(Рис.8)
Как правильно запустить квадрокоптер
Прежде чем первый раз запустить дрон в полет, необходимо тщательно изучить инструкцию к нему, убедиться, что он собран правильно и оснащен защитой винтов и посадочными лыжами. Также нужно проверить заряд аккумулятора и подключение камеры, работоспособность пульта, с которого будет осуществляться пилотирование.
Если дрон полностью готов, можно переходить к урокам управления квадрокоптером, запустить его на пустыре, поле, широкой площадке
Важно, чтобы поблизости не было высоких домов, проводов, деревьев и скоплений людей. Устройство размещают на ровном месте, а потом движением джойстика вперед поднимают в воздух
Как запустить квадрокоптер без пульта
Пульт — не единственное устройство, позволяющее запустить дрон. Видео об управлении квадрокоптером показывают, что руководить полетом можно также через телефон с помощью специальной утилиты.
Алгоритм запуска дрона в воздух через мобильный зависит от настроек конкретного приложения. Некоторые утилиты поддерживают только простое управление и позволяют дистанционно включать камеру и делать снимки. Другие полностью подменяют собой пульт и дают возможность выбирать режим полета.
Совет! Чтобы разобраться, как именно запустить квадрокоптер без джойстика, нужно изучить особенности конкретной модели и действующего для нее мобильного приложения.
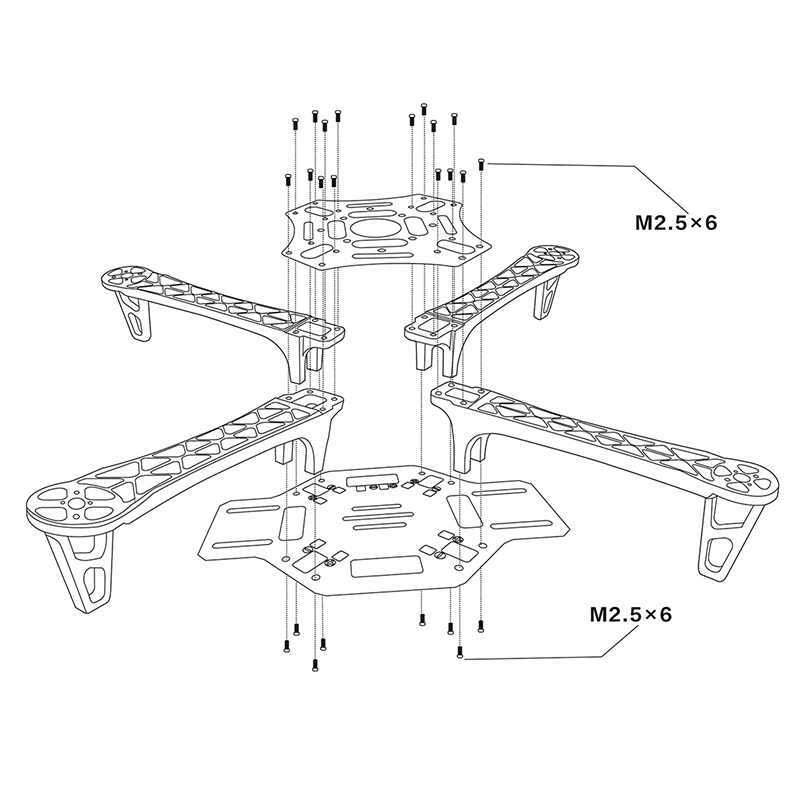
Как подготовить квадрокоптер к полету?
- Вставьте аккумулятор в квадрокоптер, но пока не включайте его (если у вашего дрона встроенная батарея, то пропустите этот пункт).
- Поставьте коптер на ровную поверхность. Если будут уклоны, то калибровка собьется. Поэтому ищите ровную площадку, чтобы не пришлось десятки раз перенастраивать дрон.
- Теперь нужно активировать сам аппарат. Но при включении пусть он будет у вас в руках. Как только активировали, сразу же ставьте на ровную площадку. Как правило, синхронизация гироскопов происходит за пару секунд (на стареньких моделях процесс длиться немного дольше). Коптер беспокоить секунд 10-20 не стоит. Пусть гироскопы начнут работать и произойдет калибровка.
Советы и типичные ошибки
На первых этапах никогда не запускайте аппарат слишком высоко, особенно в тех ситуациях, когда недалеко от вас находится огромное количество людей. При совершении малейших ошибок техника может не только упасть и сломаться, но также травмировать окружающих людей. Вращающиеся лопасти могут нанести серьезные увечья.
Если вы новичок, никогда не направляйте аппарат сторону рек. Затем, уже после освоения базовых навыков, вы сумеете полноценно пользоваться квадрокоптером над реками, на территории парков и мест, где сосредоточено большое количество людей.
Неопытным пользователям не нужно приобретать дорогостоящие модели. Вне зависимости от аккуратности обучения управлению или места для тренировочных полетов, всё-таки нередко приходится сталкиваться с ситуацией, когда коптеры падают. С другой стороны, техника предлагает широкие возможности для новичков, упрощающих маневрирование в сложных местах – четвертые Фантомы даже анализируют обстановку с помощью бортовых датчиков, предотвращая столкновения.
Беспилотник — это устройство с простой схемой управления. Набравшись немного практики, вы сами убедитесь в этом.
Как подключить квадрокоптер к смартфону?
Необходимо знать не только, как запустить квадрокоптер Mobicaro или другой, но и как его подключить к смартфону. Современные телефоны (смартфоны) имеют много функций. К ним можно подключать беспилотник и управлять им. Все функции аппарата будут у пользователя в сжатом формате в руках. Для подключения коптера к телефону через Wi-Fi необходимо в его память скачать мобильное приложение (для Android – Google Play, для iPhone – App Store), которое ориентировано на работу с конкретным летательным аппаратом. В инструкции по эксплуатации или на упаковке прибора приводится QR-код для скачивания.
На смартфоне активизируют канал Wi-Fi. Квадрокоптер включают, и обычным образом подключают к раздаваемому аппаратом каналу Wi-Fi. Для выполнения данной операции вводить пароль обычно не нужно. Запускают ранее загруженное приложение.
На экране должны появиться:
- виртуальные стики;
- кнопки;
- служебные мнемограммы.
Если беспилотник оснащен полетной видеокамерой, то данная информация будет указана в виде поступающего с камеры изображения. Далее запускают двигатели и отправляют квадрокоптер в полет.
Преимущество подключения через канал Wi-Fi заключается в том, что на экране смартфона видео передается в реальном времени. Все полетные функции контролируются простыми касаниями экрана. Смартфон понятен практически всем молодым пользователям.
Из недостатков специалисты отмечают малую дальность управления и необходимость регулярного обновления приложения.
Как увеличить радиус действия таких квадрокоптеров
Все очень просто, не нужно ничего делать с дроном, разбирать его, крепить на него внешние антенны или усилители сигнала.
Вам понадобится лишь вот такой гаджет:
Купить Xiaomi WiFi Mi Amplifier 2 – от 573 руб.
Это усилитель сигнала Wi-Fi, который работает в режиме ретранслятора, увеличивая зону покрытия сети.
Его можно включить в квартире и разместить у окна, если летать возле дома либо взять с собой. Штука компактная и работает от любого PowerBank, например от такого:
Купить Xiaomi Power bank 2 10000 mAh – от 1 259 руб.
Можно взять с собой и летать в любом месте.
Работает все следующим образом:
1. Собираем квадрокоптер, устанавливаем аккумулятор и включаем его.







2. После того, как дрон создал сеть Wi-Fi, подключаемся к ней со смартфона.
3. В приложении Mi Home, через которое осуществляется настройка Mi Amplifier, выбираем усилитель Wi-Fi и активируем функцию ретранслятора.
Теперь «стик» Xiaomi будет усиливать сеть, раздаваемую квадрокоптером.
Имейте ввиду, что держать усилитель рядом с собой будет бессмысленно. Если дрон не достанет сигналом до смартфона, то и до репитера вряд ли добьет.
PowerBank с подключенным Mi Amplifier нужно расположить между пилотом и предполагаемой зоной полетов.
Работать все это будет при условии, что квадрокоптер управляется со смартфона. Радиус работы радиопульта не увеличится.
Некоторые модели управляются при помощи пульта ДУ, но для вывода картинки для FPV используется Wi-Fi сеть. Смартфон подключается к ней и выводит изображение с камеры дрона.
Купить квадрокоптер Visuo XS809W – от 2 592 руб.
В таком случае радиус полетов не увеличить, но можно получить более уверенную картинку с камеры на смартфон и меньшую задержку при передаче сигнала.
Вот такой простой способ немного прокачать китайские квадрокоптеры.
iPhones.ru
Проверили — работает.
Синхронизация с пультом
- Джойстики с левым и правым стиком;
- Режимы полётов;
- «Флип» или поворот на 360 градусов;
- Направление движения вперед-назад;
- Еще один переключатель режимов;
- Включение-Выключение пульта управления.
У большинства дронов китайского производства, таких, как Syma, процесс синхронизации очень простой. Пульт достаточно включить и дождаться звукового или светового сигнала от дрона. Так происходит у большинства моделей, построенных с использованием трехосевого гироскопа.
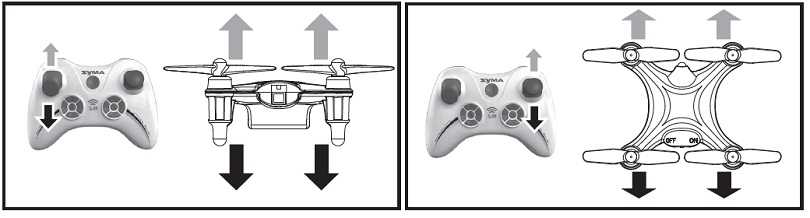
Чтобы подключить пульт для дрона с шестью степенями свободы позиционирования, необходимо:
- включить пульт;
- переместить джойстик тяги вверх;
- опустить левый джойстик вниз;
- получить подтверждение от дрона в виде звукового сигнала или световой индикации.
Как вы уже догадались никакие курсы управления заканчивать не нужно, а управлять дроном придется с помощью специального пульта. По сути, все пульты для квадрокоптеров стандартны и слегка напоминают джойстики для игровых приставок. Они оснащаются двумя рычагами управления, где левый обычно связан с движением в вертикальной плоскости, а правый в горизонтальной.
Некоторые современные модели также имеют поддержку управления через приложение в смартфоне. При этом сам дрон и телефон нужно соединить через WiFi.
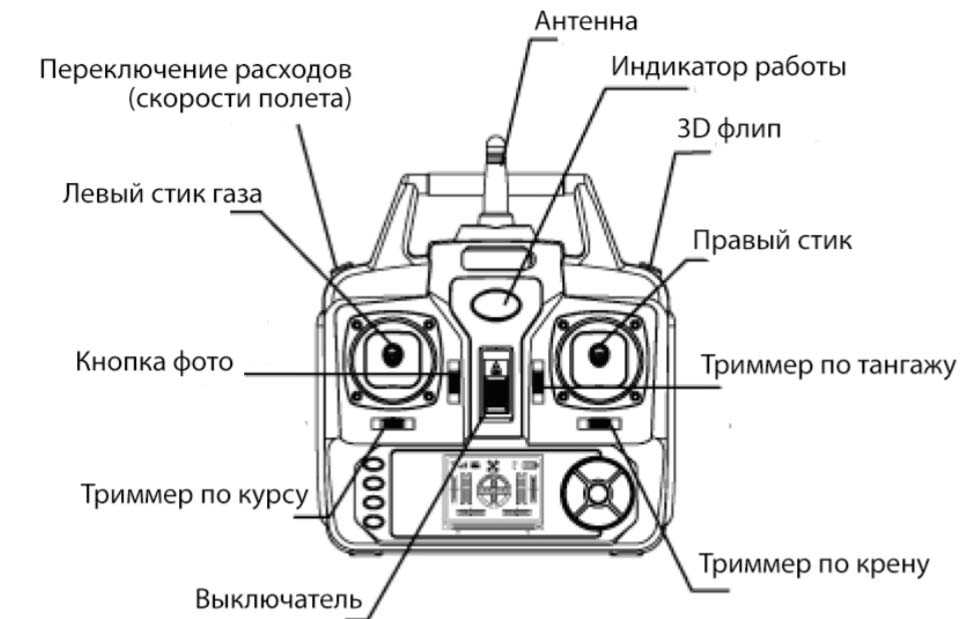
Управление квадрокоптером syma x8
Изучение всех кнопок и обозначений пульта поможет вам не потеряться во время полета. На пульте есть несколько кнопок: по центру расположена кнопка включения устройства, на торце справа кнопка выполнения флипов (трюков), на торце слева кнопка переключения скоростных режимов (расходников)
![]()
Левый стик (рычажок), называемый также стиком газа, обеспечивает подъем и снижение дрона (двигаем стик вверх и вниз), а также его вращение (стик влево или вправо). Правый стик помогает передвинуть дрон вперед, назад, вправо или влево. Переключатели (триммеры) рядом со стиком (кроме левого верхнего) нужны для того, чтобы настраивать дрон при появлении у него крена в ту или иную сторону.
![]()
Левый верхний переключатель помогает сделать фото или видео. Когда вы переведете переключатель вверх, раздастся один звуковой сигнал и загорится красный светодиод на дроне, извещая вас о созданном снимке. Перевод переключателя вниз запустит видеозапись и будет сопровождаться двойным звуковым сигналом и миганием индикаторов. Для остановки записи также нажимайте рычажок вниз. Без нажатия видео может не сохраниться.
![]()
Для запуска дрона включите его при помощи кнопки питания на обратной стороне корпуса. В момент включения на квадрокоптере будут мигать индикаторы, что говорит об отсутствии связи с пультом управления. Чтобы эту связь установить, включите пульт и нажмите левый стик вначале вверх, а затем вниз. При этом индикаторы на дроне станут светиться постоянно, что говорит об успешной привязке.
![]()
Теперь вам нужно научиться запускать и останавливать двигатели дрона. Первый способ сделать это — перевести левый стик вверх для запуска и вниз с удержанием для остановки моторов. Второй способ — это оба стика потянуть в нижние углы друг к другу. То же самое движение приводит и к остановке мотора.
Если это ваш первый опыт управления квадрокоптером, попробуйте запустить двигатели, поднять и посадить дрон, передвигая стики очень плавно. Но проводите полет только в безветренную погоду в большом свободном пространстве, например, на пустыре, где рядом нет никаких помех, нет людей и животных, которые могут пострадать от неумелого управления дроном или повредить сам квадрокоптер.
![]()
Подготовка к полету
Перед полетом обязательно проверьте всю аппаратуру — пульт, приемник, камеру и видеопередатчик. Как то раз, я захотел полетать, вышел, включил пульт и дрон, взлетел, опустил шлем на глаза — а там нет видео! Пришлось экстренно выключать двигатели и дрон упал. Почему я выключил двигатели? Поднялся я всего метров на 6, а шлем почему-то опустил на глаза не сразу и не посмотрел, в какую сторону полетел дрон (выравниваюсь в полете, места много, летал тогда на заднем дворе частного дома), но этих 6 метров хватило, чтобы дрон залетел за часть дома. Там никого быть не должно было, так как все знают, что у меня время полетов и я принял решение отключить двигатели. Не совершайте моей ошибки, у меня все обошлось, сломал только крепление от экшен-камеры. Всегда полностью проверяйте всю периферию.
Установка и запуск jMAVSim на Linux Ubuntu
Разработчики PX4 в качестве стандартной системы рекомендуют Linux Ubuntu 16.04 LTS. Linux позволяет производить сборку пакета PX4 под все поддерживаемые системы (аппаратные платформы на базе NuttX, Qualcomm Snapdragon Flight, Linux, среды симуляции, ROS).






Первым делом добавляем пользователя в группу «dialout»:
Перелогинимся в систему, для того чтобы изменения вступили в силу.
Установка среды разработки (development toolchain) для Pixhawk/NuttX, включая jmavsim, осуществляется автоматически с помощью скрипта ubuntu_sim_nuttx.sh. Нужно скачать скрипт в каталог пользователя и запустить его с помощью команды
На все задаваемые скриптом вопросы ответить положительно.
По окончании выполнения скрипта перезагрузить компьютер.
Нам осталось скачать исходный код контроллера, управляющий полётом, и осуществить его сборку.
Клонируем репозиторий ПО полётного контроллера PX4 с github:
В папке Firmware теперь у нас лежит полный исходный код, который исполняется в полётном контроллере (и в симуляторе). В дальнейшем он может пригодится как для целей изучения, так и для внесения в него правок. Переходим в скопированную папку Firmware репозитория:
Осуществляем компиляцию и запуск симулятора:
Процесс первой компиляции занимает некоторое время. После успешного завершения на экране появится консоль PX4:
Дрон можно отправить в полёт, введя в консоли команду:
Посадка дрона – команда , остановка симуляции – CTRL+C или команда .
Возможные проблемы
При подключении беспилотника через мобильный телефон могут возникнуть некоторые трудности во время пилотирования:
- Потеря сигнала. В среднем, Wi-Fi соединение остается хорошим и надежным на расстоянии 50-100м. Если коптер выходит за эти пределы, управление может быть прервано, что приведет к потере аппарата или повреждению аппарата из-за падения.
- Плохое качество изображения с камеры. Если изображение передается в высоком разрешении или с сильным сжатием, то передача может затормозиться, замедлиться и прерваться. Особенно владельцы дешевых смартфонов часто сталкиваются с этой проблемой. Бюджетные устройства просто не могут справиться с обработкой видео и одновременным управлением.
На качество пилотирования могут влиять общие помехи. Если сигнал Wi-Fi в выбранной области нестабилен, вы не сможете надежно управлять беспилотником даже на коротком расстоянии.
Почему квадрокоптер не подключается к телефону
Иногда владельцы четырехместных вертолетов сталкиваются с ситуацией, когда беспилотник вообще не может видеть телефон. Это может быть связано с несколькими причинами:
- вы выбрали место, где нет Wi-Fi сигнала для тестового полета, в этом случае вы должны попытаться подключить телефон к квадрокоптеру через приложение в другом месте;
- Беспилотник поврежден и нуждается в ремонте — эта причина особенно вероятна, если он недавно пережил сильное падение;
- Если инструмент не работает, вы можете деинсталлировать приложение, затем загрузить его снова и попробовать сопряжение вашего телефона с квадрокоптером снова;
- Операционная система смартфона работает некорректно — в этом случае проверьте, не заражен ли гаджет, или обновите прошивку.
Причиной проблемы может быть неисправный беспроводной модуль в квадрокоптере. В этом случае беспилотник может быть отправлен на ремонт или замену только по гарантии.
Рекомендации по зимним полетам от DJI
Батарея
Как и многие современные портативные устройства, в беспилотных летательных аппаратах DJI используются литий-полимерные и литий-ионные батареи. Холодные температуры могут вывести ваши батареи из зоны комфорта, что приведет к снижению их химической активности. Следуйте советам ниже, чтобы обеспечить безопасный полет:
- Используйте только полностью заряженные батареи.
- Предварительно нагрейте батарею до 20°C или более. Для проверки температуры батарей используйте мобильные приложения DJI. Для нагрева батарей без функции самообогрева можно использовать устройство DJI Battery Heater. И вообще, старайтесь держать батареи в тепле (особенно, если у вас есть резервные источники питания).
- Дайте дрону зависнуть на минуту, чтобы батарея нагрелась.
- Двигайте ручками управления аккуратно и плавно, чтобы предотвратить скачки напряжения в батарее.
- Всегда и постоянно контролируйте уровень заряда аккумулятора, так как на холоде он падает быстрее.
![]() Вот такой специальный свитер для квадрокоптера может стать выходом из положения
Вот такой специальный свитер для квадрокоптера может стать выходом из положения
Погодные условия
Снижение видимости и влажность из-за снега могут представлять скрытую опасность для съемки захватывающих зимних пейзажей
Важно принять правильные меры предосторожности:
- Уточните погодные условия до полета дрона. Не летайте при сильном ветре, дожде и снеге.
- Не рекомендуется летать при температурах ниже 0°C, но в этом вопросе все под вашу ответственность.
- Избегайте контакта аппарата со снегом. Влага может повредить двигатели. Для взлета и приземления обязательно используйте специальный коврик.
- Убедитесь в том, что сигнал GPS достаточно сильный.
![]() Сложно удержаться при виде такого пейзажа и не запустить своего дрона с камерой в воздух!
Сложно удержаться при виде такого пейзажа и не запустить своего дрона с камерой в воздух!
Одевайтесь теплее
Вы когда-нибудь сталкивались с неожиданным отключением вашего мобильного устройства из-за холода? Как уже ранее говорилось, низкие температуры могут сократить срок эксплуатации батареи, особенно типа LiPo. Поэтому помимо заботы об интеллектуальной полетной батарее, не забывайте заботиться о своем мобильном устройстве, которое лучше держать в тепле. Позаботьтесь также о тепле для своих рук, так как эксплуатация пульта дистанционного управления замерзшими руками потенциально опасна. Обязательно надевайте перчатки, но заранее побеспокойтесь о том, чтобы эта модель перчаток позволяла вам не только не замерзнуть на морозе, но и легко управлять пультом.
![]() Очень полезная вещь – специальный коврик для взлета и посадки квадрокоптера зимой
Очень полезная вещь – специальный коврик для взлета и посадки квадрокоптера зимой
Настройки камеры: экспозиция и баланс белого
Чтобы запечатлеть красоту снега, вам нужно вручную установить экспозицию камеры и баланс белого. Съемка в автоматическом режиме может закончиться появлением затемненных изображений. Это связано с тем, что система экспонирования камеры иногда может недоэкспонировать снег, обманувшись его яркостью. Добавив дополнительные стопы, вы слегка переэкспонируете свои фотографии, но получите нужные параметры компенсации для съемки заснеженных пейзажей. Точно так же вам необходимо соответствующим образом настроить баланс белого, чтобы получить правильный цветовой баланс снежного пейзажа. В противном случае снег может выглядеть серым.
Хранение
Если вы долгое время не эксплуатировали свой дрон, это может повлиять на его производительность. Правильное хранение – ключ к безопасному полету. Рекомендуется:
- Полностью заряжать и разряжать батареи один раз в три месяца для поддержания работоспособности.
- Снимать пропеллеры и устанавливать на подвес защиту во время хранения.
- Храните дрон в сухом, свободном от магнитных помех месте при температуре около 25 °C.
О том, как управлять квадрокоптером или другим типом беспилотника, можно прочитать в специальной статье “Как управлять квадрокоптером: руководство для начинающих”.
Популярные вопросы о курсах
Сколько стоит обучение в школе?
Полный курс обучения, состоящий из трех уровней и экзамена, стоит 20.000 рублей. Но платить вперед не нужно — Вы оплачиваете только фактически пройденные этапы. Например, пройдя первый и второй уровни, Вы решили, что Вам не нужен документ об образовании и все, что Вам было нужно, уже пройдено. Тогда Вы оплатите только 2 этапа — 10.000 рублей с возможностью продолжить обучение в будущем.





Где проводится обучение на оператора дрона?
Обучение проводится на открытом воздухе на одной из рекомендованных площадок. Список этих площадок периодически изменяется. В Москве в настоящий момент есть 2 рекомендованные площадки: СВАО, район Ростокино (ст.м ВДНХ, МЦК Ростокино) и ВАО, Метрогородок (МЦК Белокаменная)
Какой возраст слушателя предполагается Вашим курсом? Думаю мне слишком много/мало лет.
Самому юному нашему выпускнику — 12, самому возрастному — 70. Средний возраст слушателя в пределах между 30 и 40 годами. По нашему опыту, возраст слушателя не влияет на результаты в обучении. Если Вы уже отличаете (еще отличате) где лево, а где право, добро пожаловать на курс.
Мне нужно больше практики. Можно сократить теорию и получить больше практики управления дроном?
Наш курс построен в формате интенсива. Мы не потратим много времени на теорию, но она очень важна. Именно в теоретической части мы расскажем о том, как управлять дроном грамотно и безопасно, не допуская аварий и не теряя технику. Это очень важный этап и сокращать его нельзя. Практических занятий в рамках курса в большинстве случаев достаточно для освоения техники. Для закрепления практики у нас предусмотрена программа стажировки — по окончании курса Вы можете поработать на реальных объектах и мероприятиях, оттачивая свои навыки и получая оплату. Но если Вам требуется больше времени с инструктором — дополнительное заняте стоит 5000 рублей.
Как получить работу после обучения в школе?
Специалисты по работе с дронами, в том числе аэрооператоры, сейчас очень востребованы. Подробно на этот вопрос мы отвечаем на третьем этапе обучения и даем конкретные алгоритмы. Вкратце, Вы можете развиваться как фрилансер/предприниматель и принимать заказы на аэросъемку, либо Вы можете устроиться на работу по найму. В первом случае, Вам нужно будет подготовиться к сотрудничеству с будущими клиентами:
- Зарегистрироваться самозанятым или ИП
- Подготовить небольшой портфолио (в этом поможет наша стажировка)
- Сделать сайт и/или страницы в соцсетях
- Выйти на первых клиентов (как это сделать мы также Вам покажем)
Для того, чтобы устроиться на работу по найму, Вам потребуется:
- Составить грамотное резюме
- Набрать портфолио
- Ознакомить со своим резюме как можно большее количество потенциальных нанимателей (кому и как писать мы расскажем на обучении)
Сколько по времени длятся курсы управления дроном?
Очное обучение в формате интенсива рассчитано на 16 ак.часов. Поскольку обучение проводится индивидуально, оно может занять как меньше, так и больше времени — от 14 до 20 ак. часов.
По любым вопросам и заказам звоните
Онлайн заявка -5%
![]()
Какую связь используют квадрокоптеры
![]()
Управление дронами осуществляется через комплектный пульт ДУ или смартфон.
Большинство квадрокоптеров используют для связи радиоканалы на частотах 2.4 или 5.8 ГГц. В первом случае девайсы стоят дешевле, но на их работу влияют вездесущие помехи в виде смартфонов, Wi-Fi роутеров и других бытовых приборов.
Передачу сигнала на частоте 5.8 ГГц применяют в основном в дорогих профессиональных квадрокоптерах, так и помех меньше, и радиус полетов может быть больше.
![]()
Купить квадрокоптер JJRC H43WH – от 2 464 руб.
Практически все бюджетные модели с Ali работают на частоте 2.4 ГГц, дрон при этом выступает в качестве Wi-Fi точки доступа, а пульт или смартфон, с которого происходит управление, подключается к нему.
Некоторые модели могут одновременно держать связь и с пультом ДУ, и со смартфоном. Первый при этом отвечает за управление, а на второй выводится сигнал со встроенной камеры.